Prototipo de silla de ruedas inteligente controlada por electromiograma
Resumen
La discapacidad física, tiene distintas manifestaciones, en los niveles más severos imposibilita la interacción del individuo con su entorno. En el caso de las personas con problemas de locomoción o movilidad reducida debido a una enfermedad o lesión física, una silla de ruedas les brinda la capacidad de desplazarse con mayor libertad. Las sillas de ruedas tradicionales no brindan independencia de movimiento a personas que además de los problemas de locomoción en el tren inferior, tienen problemas del tren superior que limiten la fuerza y el movimientos de sus brazos, ya que los hace dependientes de alguien que controle la movilidad de la silla. En este trabajo se busca dotar de control sobre la silla de ruedas a estos individuos que no pueden manipularla a consecuencia de debilidad del tren superior. Mediante el diseño y construcción del sistema de adquisición de señales electromiográficas, desarrollo del firmware para la clasificación de las señales electromiográfícas y un prototipo electro-mecánico de la silla de ruedas eléctrica. En la sección de resultados se muestra la implementación del sistema y pruebas que se realizaron para probar la funcionalidad del mismo. Esto con el fin de sentar las bases para la generación de sillas de ruedas eléctricas que puedan ser controladas mediante señales electromiográficas.
Palabras clave: Señales electromiografías, discapacidad motriz, procesamiento de señales.
Abstract
Physical disability, has different manifestations, in the most severe levels it affects the individual's interaction with their environment. In the case of people with locomotor disability or reduced mobility due to illness or physical injury, a wheelchair gives them the ability to move more freely. The traditional wheelchairs do not provide independence of movement to persons that besides the problems of locomotion in the lower body, have problems in the upper body that limit the force and movement of their arms, as a result they become dependent of someone who controls mobility the chair. This paper seeks to provide independence to these individuals who cannot control the chair due to weakness of the upper body, as it presents the design and construction of the system that acquire electromyographic signals, firmware development for the classification of electromyographic signals and the electro-mechanical prototype of an electric wheelchair. In the results section the system implementation and trials were performed to test the functionality of it. This in order to lay the foundation for the generation of electric wheelchairs that can be controlled by electromyographic signals.
Keywords: electromyographic signals, motor disability, Signal processing
Introducción
Hoy en día, los avances en la ingeniería biomédica permiten obtener diversos biopotenciales como son electroretinograma, el electrocardiograma, el electroencefalograma y la electromiografía (EMG)(Merletti & Parker, 2004). El procesamiento de estos biopotenciales permite generar ventanas de comunicación para personas con discapacidad. Mediante el desarrollo de interfaces persona máquina que mediante procesamiento computacional determinen el movimiento o intensión del usuario.
En el caso específico de la señal EMG se siguen proponiendo técnicas para su correcto procesamiento, estas deben considerar características específicas de la señal como son la duración de la muestra, frecuencia y amplitud(Chowdhury, y otros, 2013). Las señales obtenidas del paciente con diversos trastornos presentan retos para su procesamiento, ya que estas no se manejan dentro de los rangos de pacientes sanos, generalmente son más pequeñas y presentan ruido derivado de la debilidad muscular o provenientes de otros músculos cercanos a los electrodos, así mismo existen factores que perturban la señal derivados del equipo para la adquisición del mismo(MGrath & Turner, 2016).
El manejo de una silla de ruedas eléctrica puede llegar a ser un desafío para personas con trastornos neuromusculares, es por eso que en el presente trabajo se propone generar una interfaz que permita su control utilizando los impulsos bioeléctricos derivados del movimiento de los músculos del brazo. En la actualidad, se busca desarrollar sistemas interactivos mediante el desarrollo de software y hardware, que proporcionen la información y el control necesarios para gobernar una tarea(Carrington, Hurst, & Kane, 2004). Las señales provenientes del EMG, han permitido que personas con discapacidad puedan tomar control sobre tareas cotidianas, como son el transportarse o comunicarse. Estas señales son relativamente fáciles de obtener, ya que cualquier nervio activo en el cuerpo las genera presentando cualidades únicas(Hashimoto & Shimada, 2009).
Electromiograma
El EMG es el estudio de la actividad eléctrica de los músculos del cuerpo. Proporciona información muy útil sobre su estado fisiológico y sobre los nervios que lo activan. La historia de la electromiografía inicia con el descubrimiento de la electricidad y el desarrollo de la habilidad de ver, con ayuda de galvanómetros la actividad del tejido muscular(Criswell, 2011). Aunque originalmente solo se podía ver una línea de electricidad justo en el momento de contracción muscular, con el tiempo el desarrollo del sistema eléctrico que registra la actividad eléctrica del musculo mejoro permitiendo llevar registros por periodos prolongados.
Cuando un músculo se contrae, un potencial eléctrico se produce como subproducto de la contracción, este potencial eléctrico es registrado mediante electrodos que son colocados en la piel cerca del músculo (Howard, Conway, & Harrison, 2016). Aunque la intensidad del EMG presenta un incremento a medida que aumenta la tensión muscular, la relación es un proceso no lineal complejo que depende de variables, incluyendo la posición y la configuración de los electrodos. Por lo general, el EMG se amplifica y procesa para proporcionar una señal de corriente continua que está relacionada con la fuerza de contracción muscular (Kutz, 2009).
Metodología
Para poder llevar a cabo el diseño y construcción de la silla de ruedas eléctrica controlada por señales electromiográficas primero se desarrolló sistema de electromiografía, una vez probada la toma de muestras de actividad eléctrica de los músculos para los diferentes movimientos de la mano, se trabajó en el envío de los datos vía serial a la PC. Las señales electromiográfícas fueron filtradas digitalmente en la PC. Posteriormente se diseñó y construyó el prototipo de silla de ruedas eléctrica que recibe el resultado del procesamiento digital de la señales para determinar el movimiento.
3.1 Sistema de adquisición de señales electromiográficas
El uso de EMG tiene muchas ventajas, proporciona un método seguro, fácil y no invasivo que permite la cuantificación objetiva de la energía del músculo. No es necesario penetrar la piel para obtener información útil y significativa con respecto a los músculos (Criswell, 2011). En este trabajo se diseñó un sistema de EMG que sigue la estructura mostrada en la Figura 1.

Figura 1. Diagrama de bloques del sistema de adquisición del EMG
3.2 Procesamiento de la señal en la PC
Debido a que los biopotenciales se procesaron en la PC empleando MATLAB y así poder realizar su clasificación, se utilizó el microcontrolador Atmega 328 para la captura, el cual está integrado en la placa de Arduino UNO. Utilizado para el desarrollo de la programación del firmware contenido en el microcontrolador se utilizó el Entorno de Desarrollo Integrado (IDE por sus siglas en ingles).
Una vez establecida la comunicación entre el EMG y la PC, se procede a realizar la toma de muestras en MATLAB como se muestra en la Figura 2. La toma de muestra de las señales de EMG es importante ya que derivado de estas señales se caracterizara la señal, esto se traducirá en la selección del movimiento de los motores que conforman la silla eléctrica.
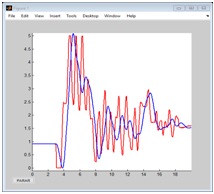
Figura 2. Primera prueba de comunicación microcontrolador-PC en MATLAB
3.3 Prototipo de silla de ruedas eléctrica
La estructura mecánica del prototipo de la silla de ruedas eléctrica se elaboró en SolidWorks versión 2016, teniendo como diseño cada una de las piezas mecánicas y el ensamblado de las mismas. Para después colocar la placa PCB del circuito del EMG y la placa PCB del microcontrolador, que conforman parte del prototipo. La silla de ruedas se realizó a escala en cuanto a las caras de las piezas, y el grosor está basado en acrílico de 0.3cm.Se comenzó con el diseño de la llanta trasera, con un diámetro de 12cm y 0.5cm al centro para ensamblar el motor, tal medida establecida a escala (x5) de una silla de ruedas estándar.
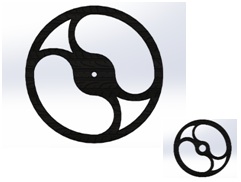
Figura 3. Vista frontal a la izquierda de la rueda posterior y a la derecha de la rueda frontal que conforman la silla de ruedas
Las medidas de cada una de las piezas siguientes se realizaron en base a la escala y disposición de la máquina de corte. Respaldo de la silla de ruedas con el mismo diseño de las ruedas, con medidas de 9.20cm de ancho, 9cm de largo y desbaste de 1cm.
El asiento se diseñó respecto al desbaste que se tiene en el respaldo, con medidas de 9.2cm de ancho y 9cm de alto. Soporte de codos, estableciendo medidas de 7cm de ancho y 5cm de alto, dando un diseño propio. El soporte delantero se diseñó con medidas de 9.2cm de ancho y 5cm de alto. Finalmente se ensamblaron cada una de las piezas, dando como resultado el diseño de la silla de ruedas, que se muestra en la Figura 4.

Figura 4. Vista isométrica de la silla de ruedas
Resultados
Se realizaron pruebas del funcionamiento de las etapas de adquisición de biopotenciales, en simulación y físicamente. Obteniendo así la caracterización de la señal emita por los músculos de la mano al realizar 4 movimientos, los rangos de estos también se pueden observar en la Figura 5.

Figura 5. Rangos de voltaje, según el movimiento de los dedos
Posteriormente empleó el toolbox de filtrado de señales de MATLAB para hacer la clasificación de las señales ya caracterizadas como se muestra en la Figura 6.
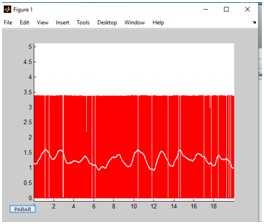
Figura 6. Filtrado de señales en MATLAB
Esta clasificación mediante filtrado digital de señales, nos permite generar valores que serán enviados al microcontrolador, este no solo mantiene la comunicación entre el EMG y la PC sino que también controla el movimiento de los motores instalados en la silla de ruedas como se observa en la Figura 7.
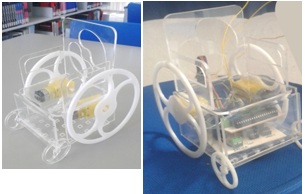
Figura 7. A la izquierda prototipo de silla de ruedas eléctrica con motores instalado y a la derecha prototipo ya con el microcontrolador y circuito de control instalado.
Finalmente, se obtuvieron cuatro movimientos de la silla de ruedas adelante, atrás, izquierda y derecha en la Figura 8, se puede observar el ensamble total del prototipo de silla de ruedas con el sistema de adquisición y filtrado de las señales digitales funcionando.
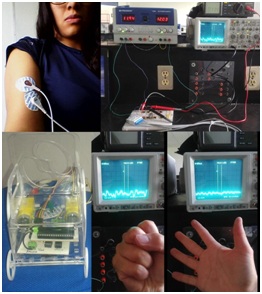
Figura 8. Funcionamiento final del prototipo de silla de ruedas eléctrico
Conclusiones
El sistema funcionó para la clasificación de los cuatro movimientos de mano, pero en algunas ocasiones presento problemas para determinar los movimientos, estos problemas en la clasificación se derivaban principalmente de que el sujeto al que se le colocaban los electrodos estaba fatigado y por ende no aplicaba la misma fuerza e intensidad al realizar el movimiento. También presento problemas con los latiguillos del EMG como consecuencia del desgaste natural de los mismos.
Como trabajo a futuro este proyecto debería ser implementado en escala real para poder hacer pruebas que beneficien directamente a la población con cualquier discapacidad que le impida libertad de movimiento, así mismo se podría mejorar la sensibilidad del sistema de adquisición y procesamiento de datos que controla el movimiento o giros finos que desee realizar quien emplee este sistema de control para sillas de ruedas eléctricas.
Bibliografía
Carrington, P., Hurst, A., & Kane, S. (2004). Wearables and chairables: inclusive design of mobile input and output techniques for power wheelchair users. Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, 3103-3112.
Chowdhury, R., Reaz, M., Mohd Ali, A., Bakar, A., Chellappan, K., & Chang, T. (2013). Surface Electromyography signal processing and classification techniques. Surface, 12431-12466.
Criswell, E. (2011). Cram's Introduction to Surface Electromyography. Sonoma: Jones and Bartlet Publishers.
Hashimoto, M., & Shimada, M. (2009). Wheelchair control using and EOG and EMG based gesture interface. 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2159-6247.
Howard, R., Conway, R., & Harrison, A. (2016). A survey of sensor devices: use in sports biomechanics. Sports Biomechanics, Online.
Kutz, M. (2009). Biomedical Engineeering Design Handbook. NY: McGraw Hill.
Merletti, R., & Parker, P. (2004). Electromyography; Physiology, Engineering and noninvasive applications. Hoboken: IEEE Press Series in Biomedical Engineering.
MGrath, N., & Turner, C. (2016). Isolated gluteal and paravertebral muscle weakness due to anti-3-hydroxu-3methyglutary-coenzyme a reductse antibody-associated necrotizing autoinmmune myopathy. Muscle & Nerve, 150-152.
[a]Escuela Superior de Tizayuca, Universidad Autónoma del Estado de Hidalgo
Tizayuca, Hidalgo, 43800, México
javhingenieer@outlook.com
Compartir en: